
Core part of what makes all our automation solution so effective is the way we leverage computer vision. On its own, DeepEye is used to elevate and streamline quality control, while offering dynamic data insights into your manual picking and packing processes.
As part of our robotic system, DeepEye ensures that our robots are precise, reliable, and effective.
Here are a few core ways we’re using computer vision technology for all current and upcoming solutions:

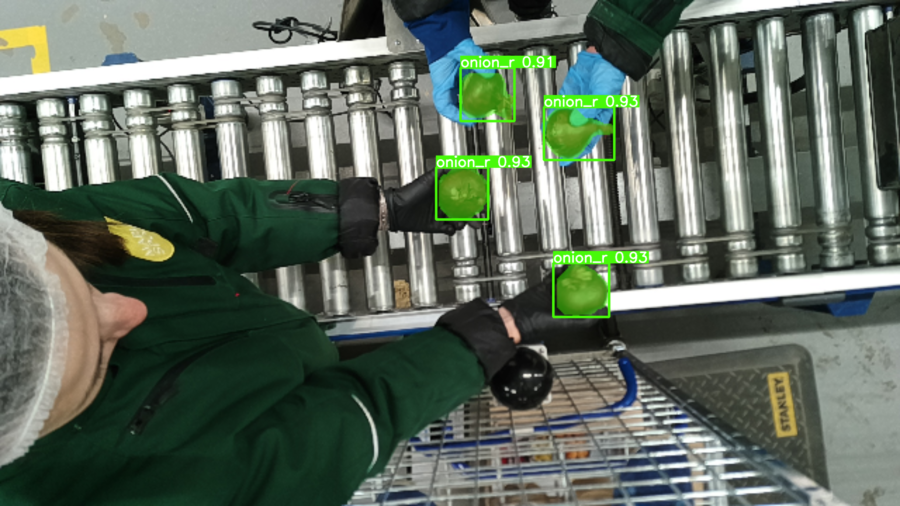
Real-time object detection and clarification.

Real-time object segmentation and classification.

CV software “tells” the robot where the object is located, so that the robot can find it immediately.

Then, based on the information provided by CV, the robot knows how to approach the object and pick it up successfully.

CV can also provide extra information to the robot – for example, if all the items are correctly packed inside the meal kit, which item has the best chance of being packed successfully.

We build our CV pipeline by using neural networks the likes of convolutional neural networks.

We take care of all CV development in house.

Our team constantly plays around with new concepts, testing new solutions to improve on existing CV methods. Blame our academic roots, but we also love implementing and testing approaches that the industry has yet to embrace.
